关注公众号【FPV One】,用最酷的姿势玩穿越机✈️
哈喽,大家好,我是小哥!
这是一期系列教程,我会从原理,部件,组装,调参,飞行技巧等几个方面来介绍新手如何入门穿越机。(更多进阶教程请打开微信小程序)
本期系列内容围绕BetaFlight地面站讲解,手把手教你飞控调参,往期精彩内容不要错过哦~
穿越机Betaflight调试教程 | 地面站下载与安装,端口配置,地面站设置
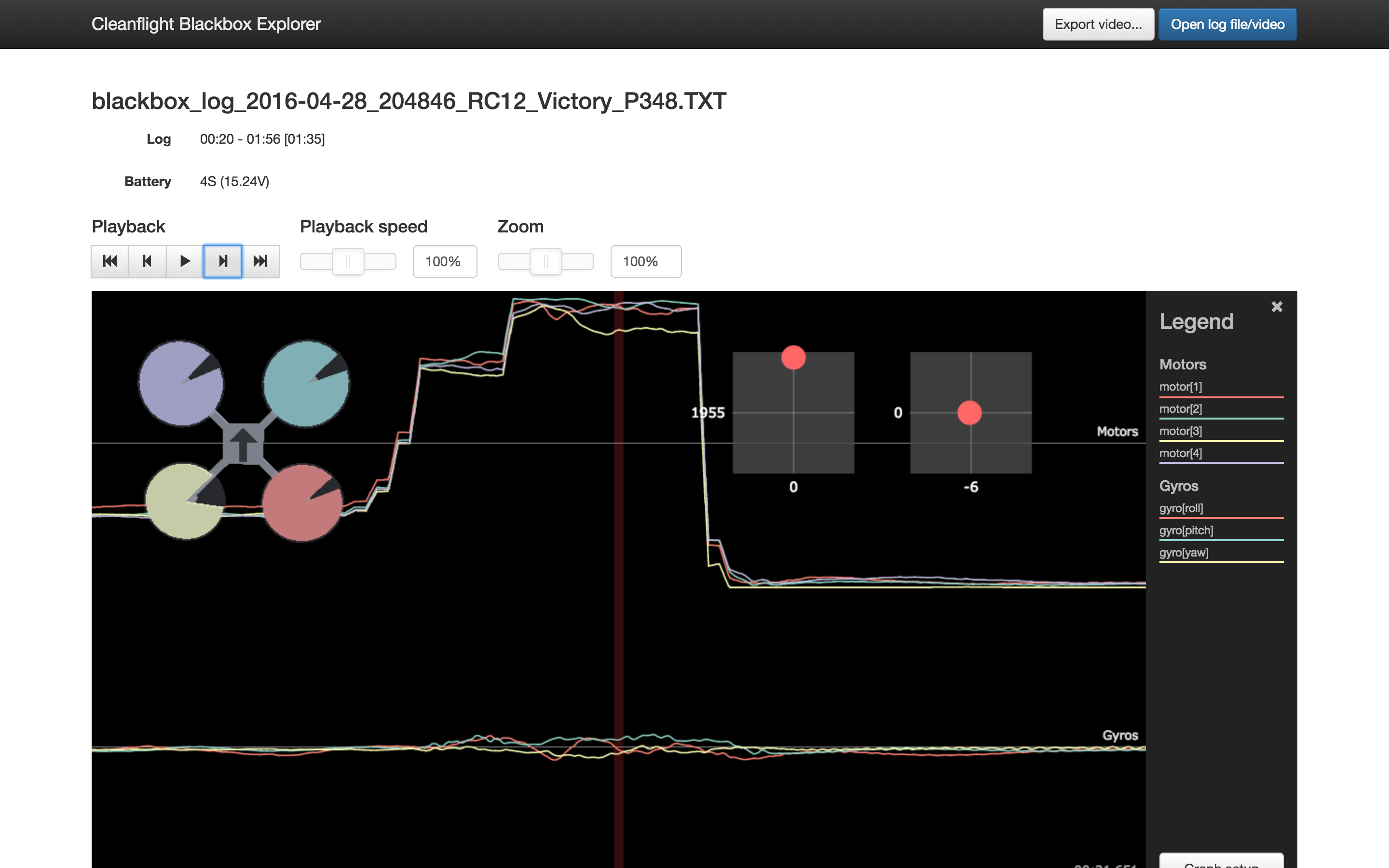
穿越机Betaflight调试教程 | 电池电压设置,遥控器设置
穿越机Betaflight调试教程 | 穿越机飞行模式解释,FPV飞行模式设置
穿越机Betaflight调试教程 | 穿越机failsafe安全保护模式
前言:
大多数无人机地面站软件(比如betaflight),允许用户调整PID值以提高飞行性能。在这篇文章中,我将尝试解释PID是什么,它如何影响无人机的稳定性和操作手感,并分享一些关于如何调整PID的方法。
TIP:
世界上没有两个人的PID是一模一样的。——小哥
正文
什么是PID
PID指的是比例(Proportional)积分(Integral)微分Derivative。如果听起来比较头疼的话也没关系,这不重要。后面我会慢慢讲解。
PID有什么用
PID控制器的目的是纠正“误差”,测量值(陀螺仪传感器的测量值)和期望的设定点(期望的转速)之间的差异。通过调整每个回路中的控制输入(即电动机的速度),可以最大程度地减少“错误”。
总的来说,PID在很多学科都有应用,在无人机领域,PID主要用来控制无人机降低损耗,减少抖动,增加平衡性,提升性能…一句话,PID可以让穿越机飞的更稳。
P,I,D
接下来说的都是重点!!!
PID其中包括P值,I值,和D值。每个值都代表不同的意思和作用。
p是控制现在,i是纠正曾经,d是管控未来
想要知道具体原理的可以访问:https://www.17fpv.com/272.html
如何调试PID
这是本文重点讲解的部分,也是各位迫切想知道的。PID调试需要按照以下几个步骤
准备工作
- 备份当前的PID值,以便在出现问题时可以返回
- 始终在手动模式下调试
- 水平校准无人机
开始调试
在这之前,我喜欢把rate先设置到我喜欢的值。
方法1:
我通常会尝试使用默认PID作为开始,然后再开始对其进行调试,以查看其感觉。使用Betaflight,Cleanflight,通常对于大多数设置来说,默认值都可以很好地工作。记下任何不良行为,然后相应地调整PID。
方法2:
另一种流行的方法是从非常低的值开始-例如将所有值降低至少一半或更多,然后再增加每个值,直到看到不良行为为止。
每次更改值时,您都应该问自己:“是变好还是变坏?”尝试找到穿越机具有最佳飞行特性的峰值,然后再开始降低性能。
一次调整一个轴:先滚动,然后俯仰,最后偏航。我在每个轴上一次调整一个值,从P开始,然后是D,最后是I.您可能需要来回微调每个值,因为更改为一个值会影响其他值。
调整PID可能会花费一些时间,可能需要10分钟,一个小时甚至几天才能获得完美值。这实际上取决于零件的质量,构造等等。所以说每个人的PID都是不一样的。
不是所有的颤抖都和PID有关
产生抖动的原因有很多,比如没有水平校准,电机有问题等等。。。
如果觉得内容对你有用,不妨一键三连。更多FPV教程、配置清单、比赛信息请关注公众号「FPV One」
用最酷的姿势玩穿越机,如需交流请加群:191340750

关注公众号「FPV One」,获取配置清单+配件购买链接

猜你喜欢





发表评论
电子邮件地址不会被公开。 必填项已用*标注